
















EC機器人30,100報警處理
1 30報警和100報警
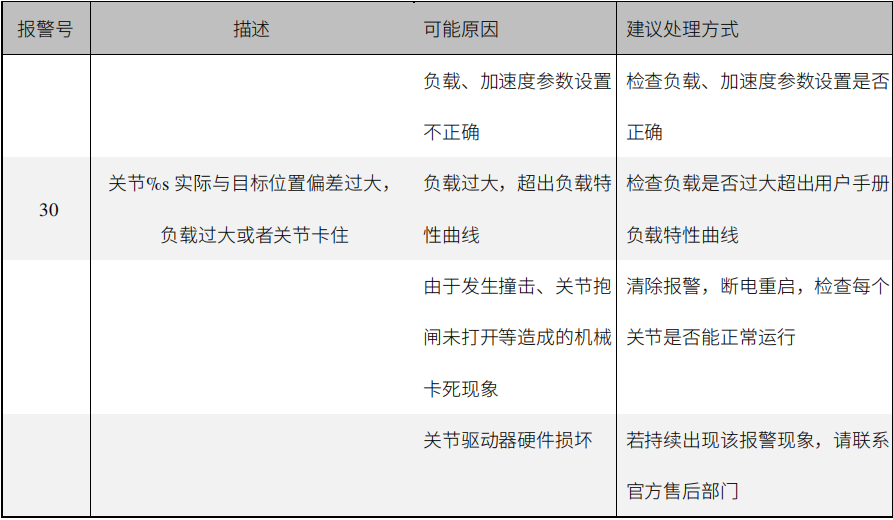
報警代碼:伺服故障碼:30,關(guān)節(jié)3實際與目標(biāo)位置偏差過大,負載過大或者關(guān)節(jié)卡住
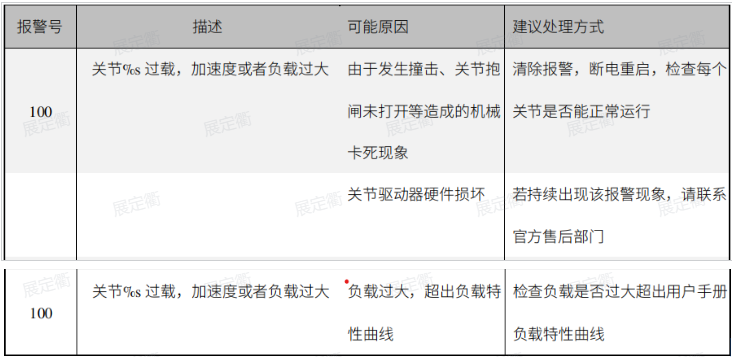
報警代碼:100關(guān)節(jié)%s 過載,加速度或者負載過大
1.1 30報警和100報警原因分析
原因1:負載或者加速度參數(shù)設(shè)置不正確,太小或太大。
原因2:檢查機械臂是否碰撞,或者憋住了。
原因3:關(guān)節(jié)抱閘未打開。
原因4:關(guān)節(jié)機械卡死,或者里面的機械結(jié)構(gòu)卡死。
原因5:關(guān)節(jié)內(nèi)部臟污,光編污染,或者驅(qū)動器硬件損壞。
1.2 排查方法
1.2.1 工具準(zhǔn)備
1. 內(nèi)六角扳手一套(用于拆卸關(guān)節(jié)端蓋)
2. 十字螺絲刀(用于拆卸電磁鐵固定片)
3. 鑷子(必要時用)
1.2.2 排查步驟
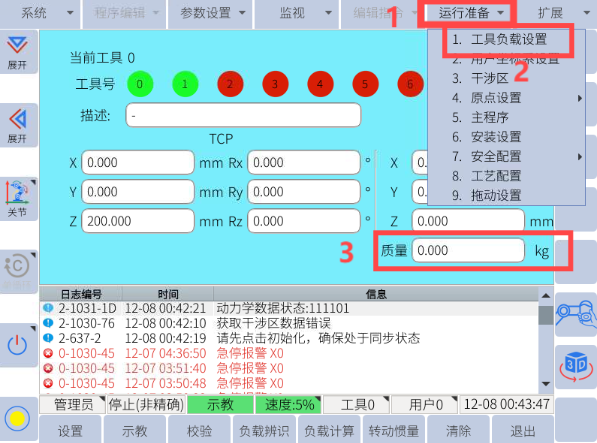
步驟一:排查機械臂負載是否設(shè)置正確。負載太大或者太小有報警30的風(fēng)險。可以在運行準(zhǔn)備界面-----工具負載設(shè)置界面,里面的質(zhì)量那里檢查負載參數(shù)。再堅持程序里面指令加減速是否正常。
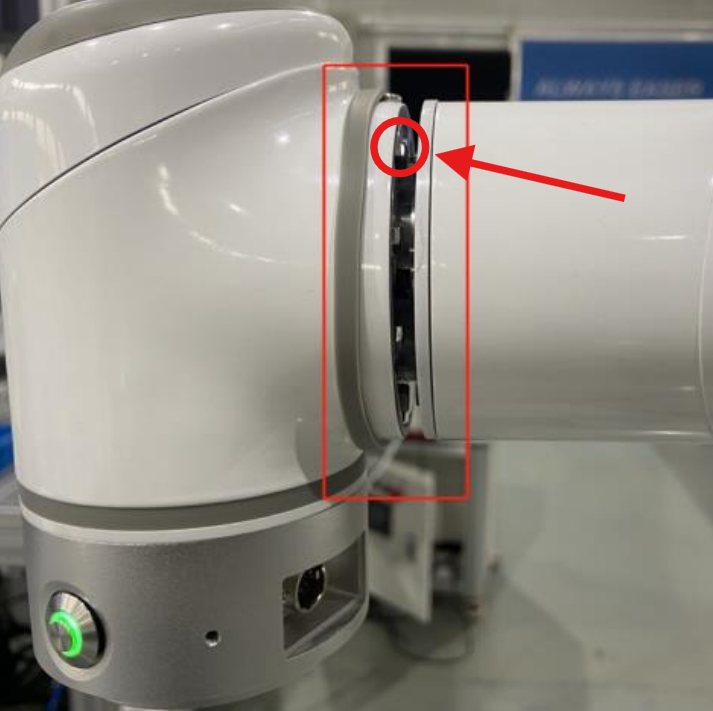
步驟二:檢查機械臂螺絲是否松動。是關(guān)節(jié)連接處螺絲是否松了,導(dǎo)致關(guān)節(jié)連接螺絲與上面的螺絲發(fā)生碰撞,出現(xiàn)100報警。
步驟三:檢查電磁鐵抱閘和減速機是否正常。1.關(guān)閉電源,將故障關(guān)節(jié)的端蓋打開,檢查電磁鐵的彈桿是否卡死或者彈桿掉落。
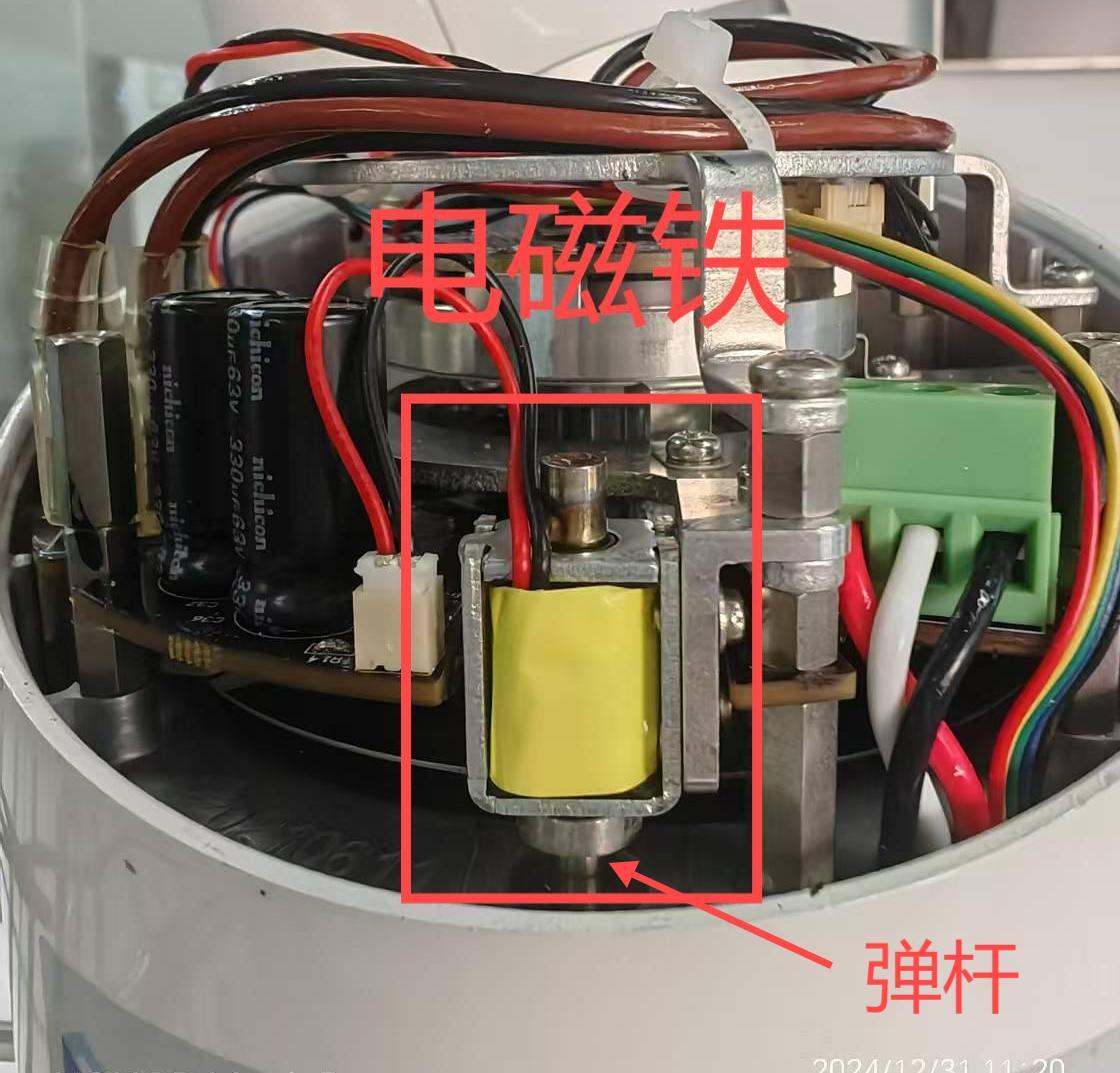
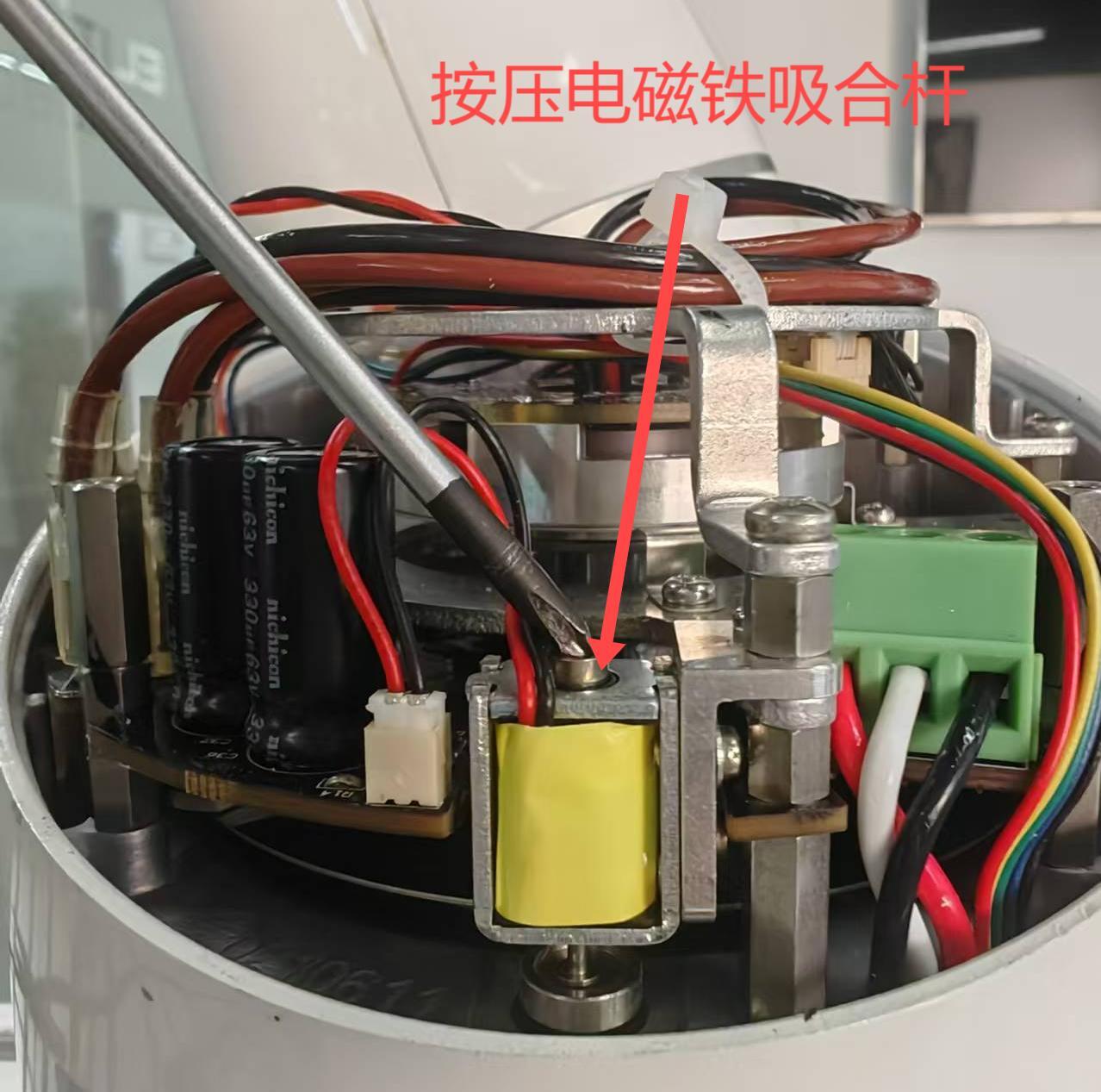
2.減速機損壞,導(dǎo)致關(guān)節(jié)內(nèi)部卡死,按壓電磁鐵,手動轉(zhuǎn)動該關(guān)節(jié),看是否有卡頓,如果卡頓,說明減速機損壞。
步驟四:檢查驅(qū)動板是否故障,如果故障會導(dǎo)致電磁鐵無法吸合,導(dǎo)致30碰撞報警。查看驅(qū)動板指示燈是否正常(紅藍常亮)。
步驟五:檢查報警30的同時是否伴有70,71,72報警,如果有,就是光編污染了。關(guān)節(jié)內(nèi)部臟污,參數(shù)異常導(dǎo)致的位置超差,引起的30或100報警。
2. 100報警與30報警的區(qū)別
100報警多描述外部碰撞原因?qū)е碌模?0報警多描述參數(shù)異常原因?qū)е碌模绻l(fā)生報警后看誰先報警,也會單獨報警,按順序排查報警原因。


























