
















EC機器人換機流程
1. 簡介
現(xiàn)場可能會由于故障等原因?qū)е滦枰鼡Q機器人本體或者控制柜以及兩者都需要更換,本篇文檔適用于現(xiàn)場更換機器人本體以及控制柜的操作流程步驟。
2. 更換操作流程
準備工作:格式為FAT32的U盤,M8內(nèi)六角扳手
2.1更換機器人本體步驟流程
2.1.1拆除本體外部設(shè)備或工裝確保無干涉回零位。

2.1.2運行至打包姿態(tài),記錄基座本體線位置。安裝新機本體線纜與舊機要一致。打包文件程序文件名如EC612(612_packing_angle_cn)。
2.1.3新本體的DH參數(shù),零點脈沖,這個可以找艾利特技術(shù),或者艾利特售后提供。
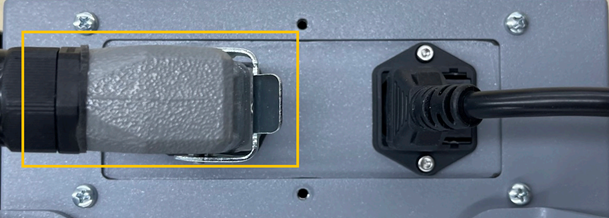
2.1.4記錄好舊機零點脈沖和DH參數(shù)后斷電拔除電源線,控制柜與本體連接線。新機換上重新恢復接入電源線,控制柜與本體連接線。
A1柜接口

B1,B2柜接口

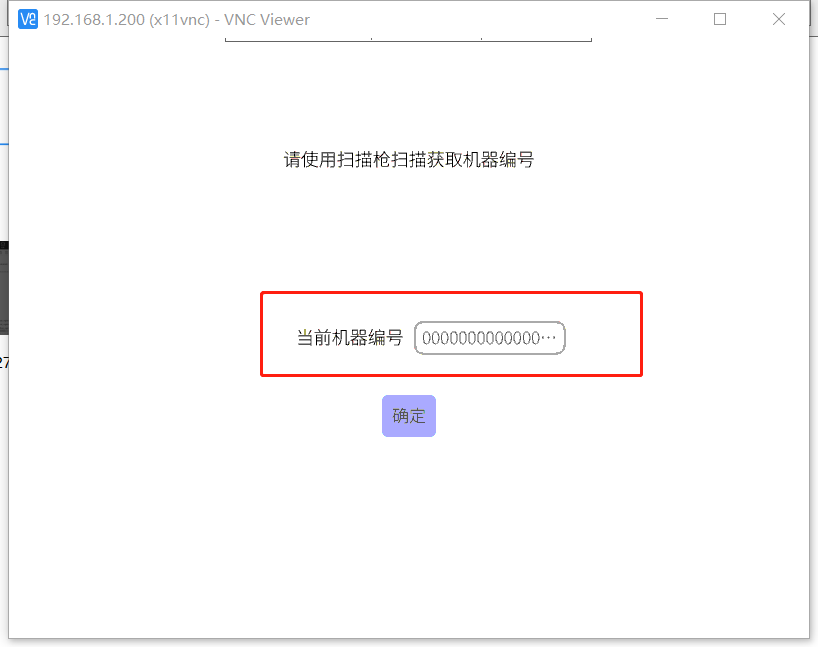
2.1.5更換本體安裝完成后使用factory_mode適配文件放置u盤根目錄下插上控制柜USB接口上電。factory_mode.key,重新上電后會彈出輸入機器人序列號界面,輸入本體銘牌序列號后點擊確定進入。
A1柜USB接口

B1,B2柜USB接口

2.1.6零位恢復
修改零點脈沖需要先登錄開發(fā)者模式。
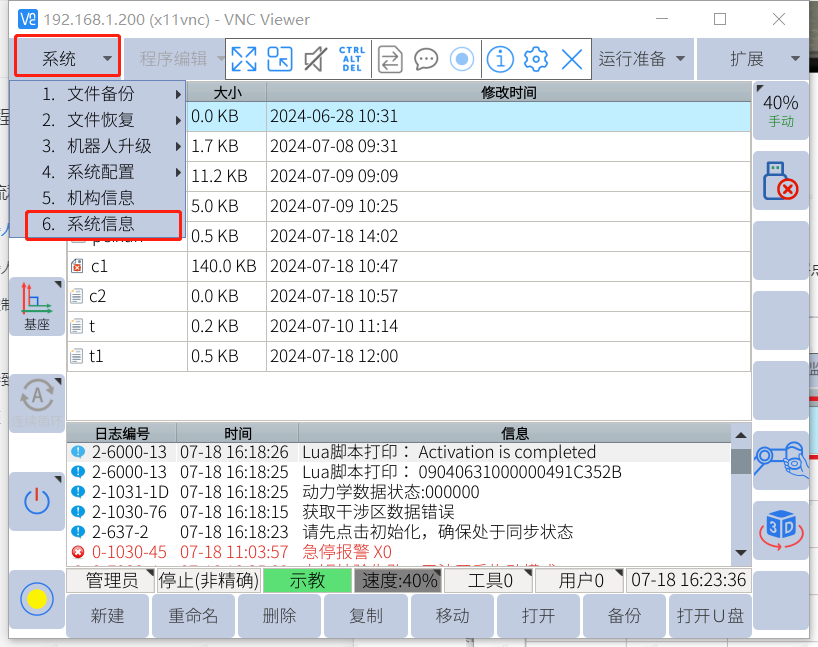
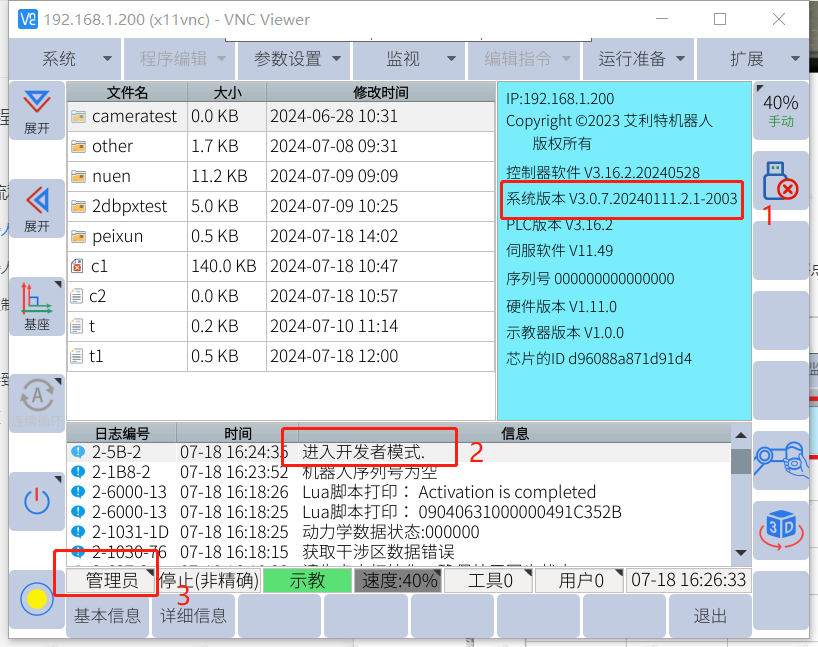
打開開發(fā)者模式。在管理員模式下點擊系統(tǒng)-系統(tǒng)信息
點擊左下角詳細信息
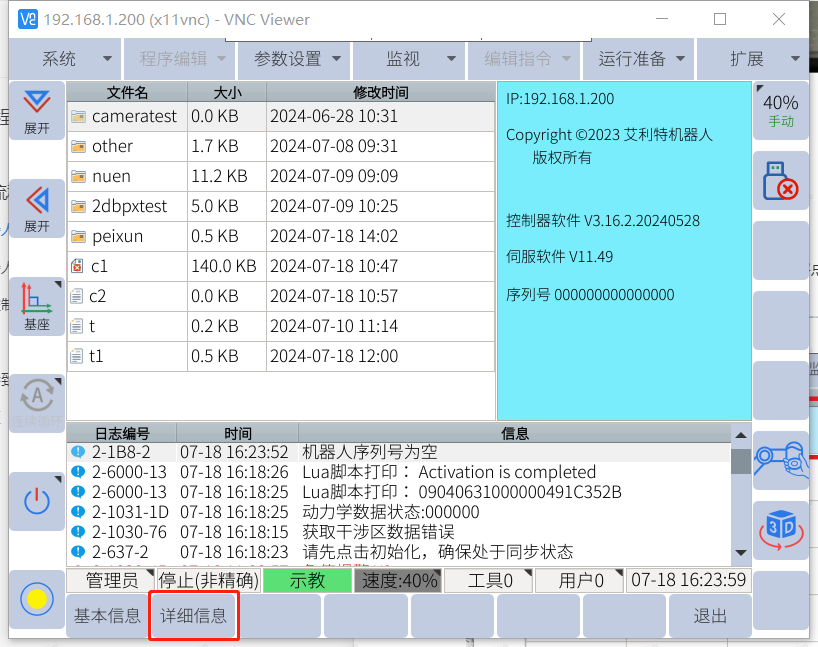
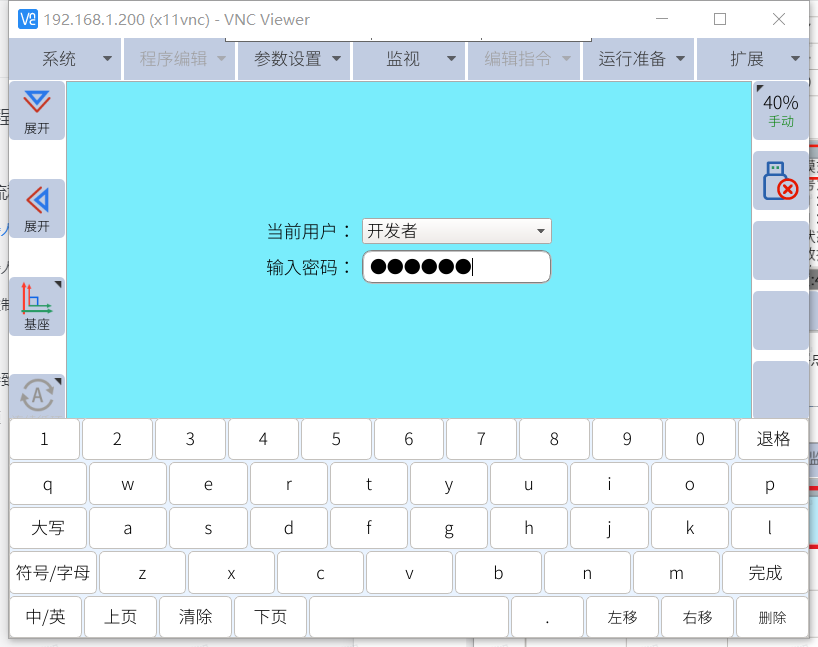
多次點擊系統(tǒng)版本觸摸位置,等待提示框出現(xiàn)進入開發(fā)者模式。點擊管理員切換開發(fā)者模式,登錄密碼123456.
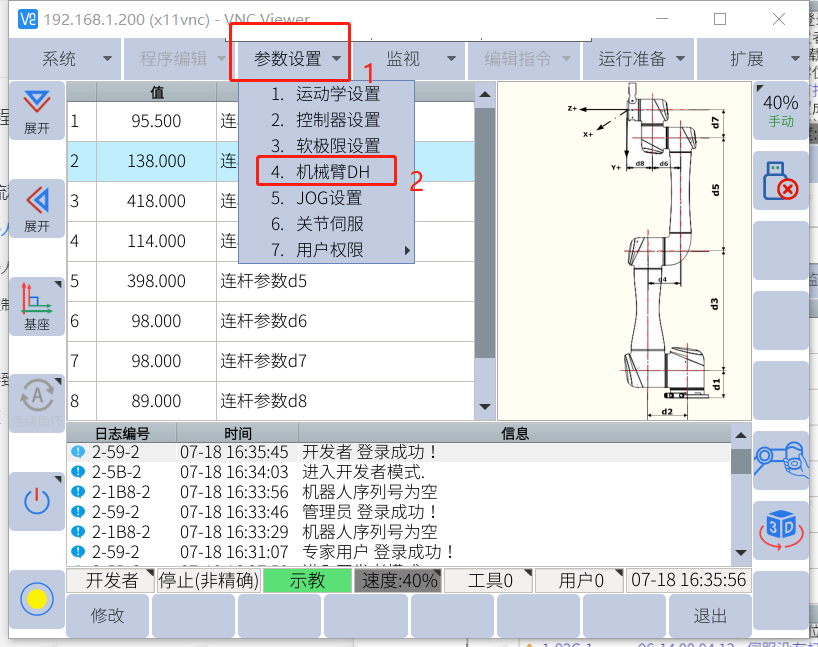
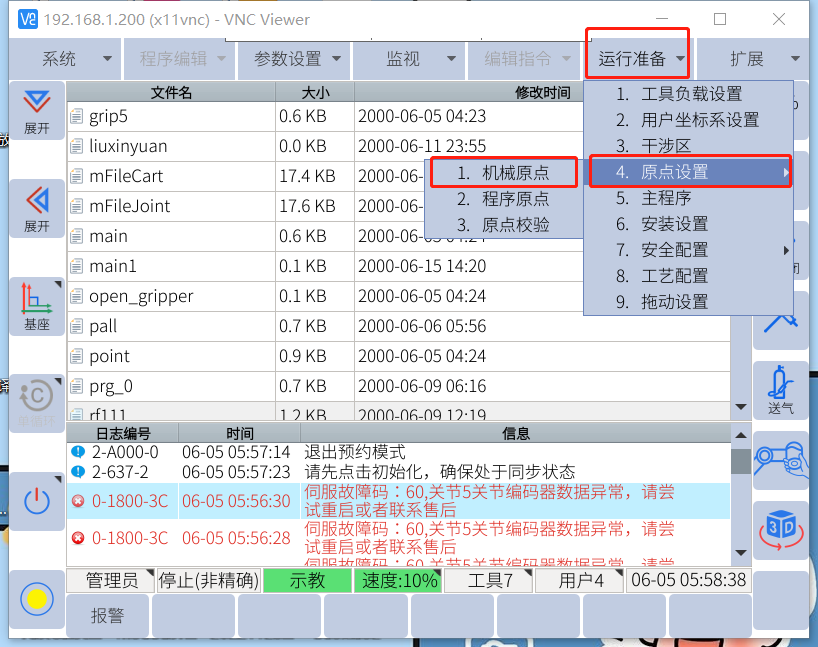
進入開發(fā)者后。點擊運行準備-原點設(shè)置-機械原點,將拍照記錄的新機零點脈沖-DH參數(shù)重新輸入后記錄。修改零點脈沖步驟如下

點擊-參數(shù)設(shè)置-機械臂DH

零點脈沖與DH參數(shù)斷電重啟后恢復使用。
2.1.7包裝箱表面寫上維修單號,等待運輸回廠
2.2更換機器人控制柜步驟流程
2.2.1備份文件(遷移備份)
準備工作:格式為FAT32的U盤
確保U盤識別,界面點擊系統(tǒng)-文件備份-遷移備份,等待提示備份完成。如下圖步驟。

2.2.2回機械原點,斷開電源拔出電源線,控制柜與本體連接線,拔除網(wǎng)線及io外部接線并做好記錄。更換控制柜后恢復插好本體線電源線及網(wǎng)線io接線。
2.2.3更換控制柜安裝完成后使用factory_mode適配文件放置u盤根目錄下插上控制柜USB接口上電。factory_mode.key(如需此文件,請聯(lián)系艾利特技術(shù)人員)。重新上電后會彈出輸入機器人序列號界面,輸入本體銘牌序列號后點擊確定進入。
A1柜USB接口

B1,B2柜USB接口
2.2.4文件恢復(遷移恢復)
文件恢復,將保存?zhèn)浞菸募盤插入控制柜。示教器界面點擊系統(tǒng)-文件恢復-遷移恢復,提示完成后恢復使用。

2.2.5包裝箱表面寫上維修RMA單號,等待運輸回廠。
2.3本體與控制柜一起更換步驟流程
準備工作:格式為FAT32的U盤,M8內(nèi)六角扳手
2.3.1備份文件
將U盤插入控制柜USB接口,確保U盤正常識別,示教器界面點擊系統(tǒng)-文件備份-備份用戶數(shù)據(jù)備份及全局變量備份。記錄機器人網(wǎng)口IP,主程序名。(單獨記錄)

記錄新機器DH參數(shù)。-點擊參數(shù)設(shè)置-機械臂DH,并拍照記錄。

2.3.2拆除本體外部設(shè)備或工裝回機器人打包姿態(tài)打包文件程序文件名如EC612(612_packing_angle_cn),記錄好基座本體線位置。
2.3.3斷開電源拔出電源線,控制柜與本體連接線,拔除網(wǎng)線及io外部接線并做好記錄。更換控制柜后恢復插好本體線電源線及網(wǎng)線io接線。
A1柜接口

B1,B2柜接口
2.3.4文件恢復
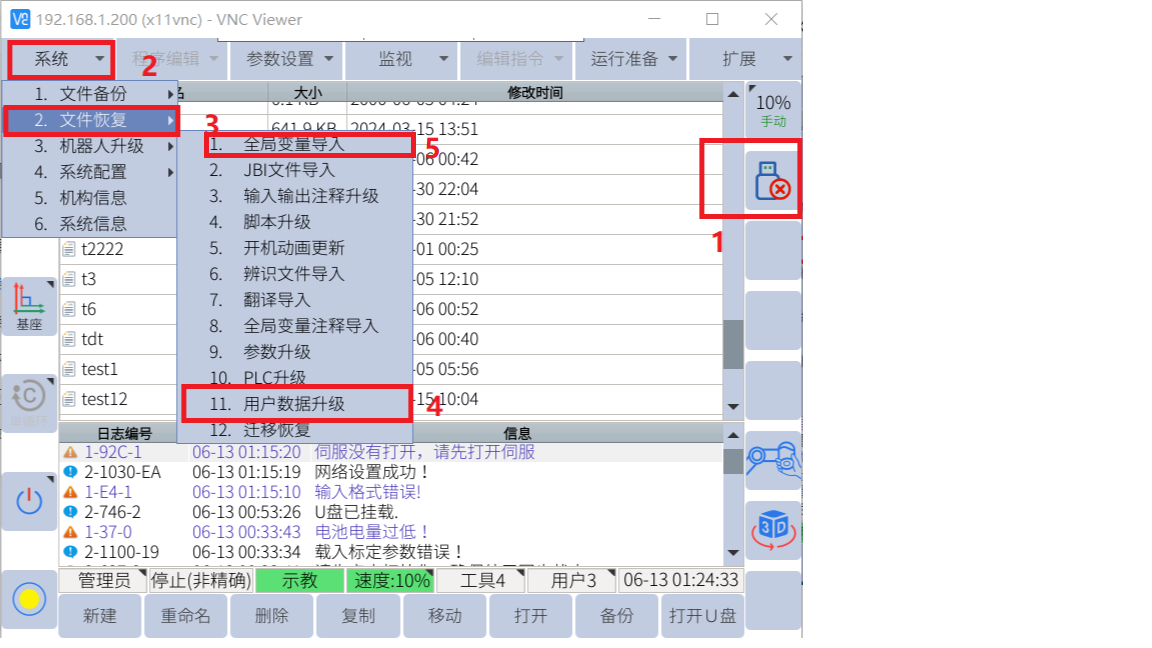
更換好成套機器人后開機將原來程序數(shù)據(jù)導入新機,將存有文件U盤插入控制柜,示教器界面點擊系統(tǒng)-文件恢復-用戶數(shù)據(jù)升級和全局變量導入

DH參數(shù)修改,因用戶數(shù)據(jù)備份包含DH參數(shù),用戶數(shù)據(jù)備份到新機后,新機DH參數(shù)會被舊機覆蓋,需將DH參數(shù)改回。
點擊-參數(shù)設(shè)置-機械臂DH進行修改
DH參數(shù)修改后重啟恢復使用。
2.3.5包裝箱表面寫上維修單號,等待運輸回廠
3. 常見問題
3.1因故障導致機器卡死無法示教關(guān)節(jié)運動或抱閘故障無法運行至打包姿態(tài)
3.1.1使用反向驅(qū)動,
控制器版本 V3.1.2,伺服版本 V11.37 及以上版本機器人反向驅(qū)動
示教器界面使用方法: 用戶可點擊![]() ,再點擊 ,在彈出頁面
,再點擊 ,在彈出頁面 點擊“確定”,此時信息欄提示: 機器人狀態(tài)已經(jīng)被重置,再點擊 ,在彈出頁面
點擊“確定”,此時信息欄提示: 機器人狀態(tài)已經(jīng)被重置,再點擊 ,在彈出頁面 點擊“確定”。
點擊“確定”。

進入反向驅(qū)動狀態(tài)。手動可以掰動機器人至需要姿態(tài)后,點擊“退出”

V3.1 以下軟件版本機器人使用關(guān)節(jié)制動器釋放
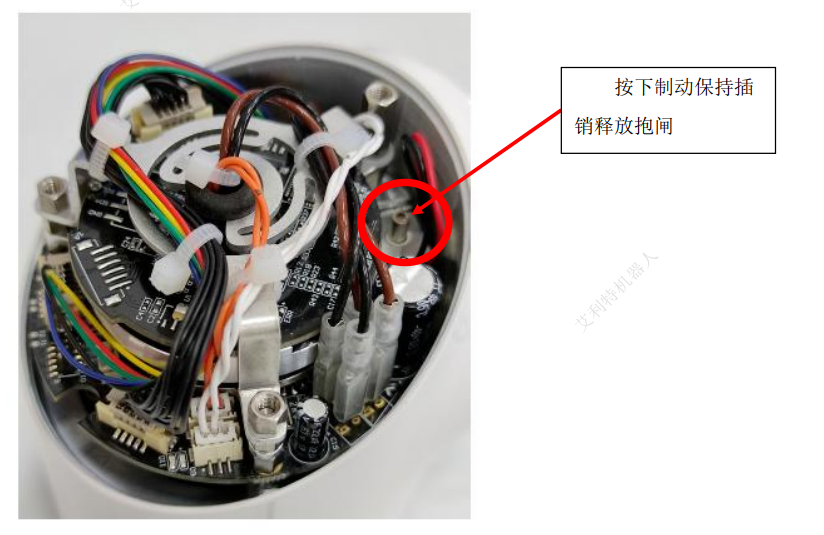
3.1.2關(guān)節(jié)制動器釋放
V3.1 以下軟件版本機器人反向驅(qū)動V3.1 以下版本無反向驅(qū)動模式,如遇緊急情況請立即按下緊急停止按鈕切斷電源,移除 相應的關(guān)節(jié)蓋,并釋放制動保持插銷,讓關(guān)節(jié)自由移動。
3.2套圈問題
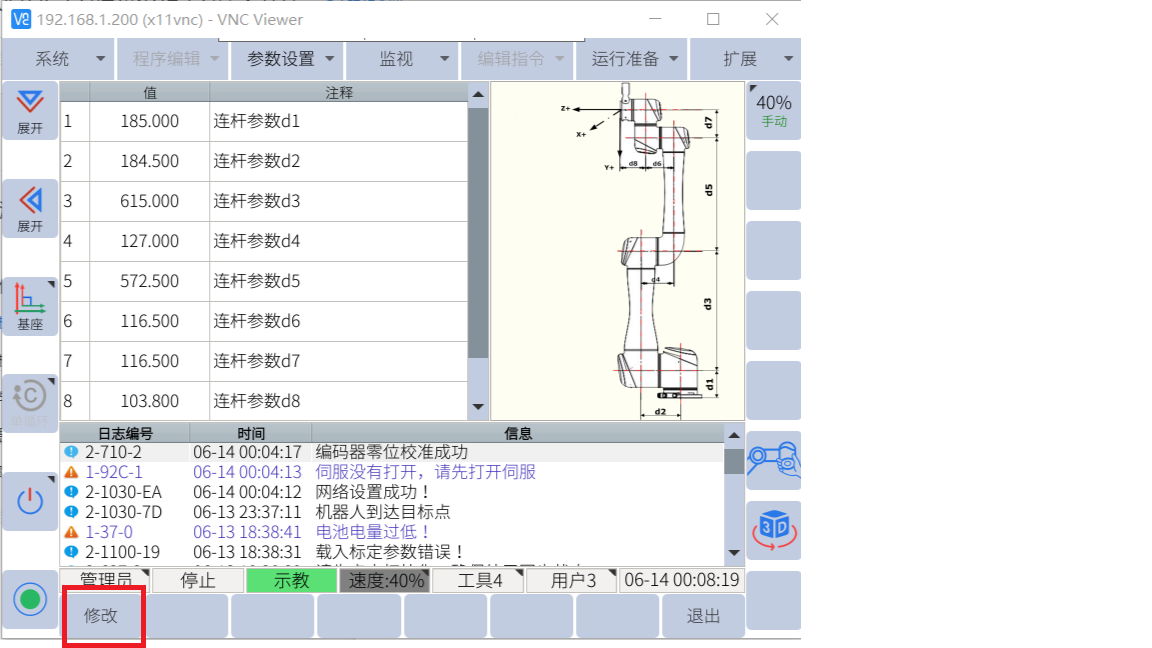
進入機械零點界面 在示教器上,先切換成開發(fā)者模式,再點擊:運行準備-原點設(shè)置-機械原點,可以進入 機械零點界面
將套圈超限的關(guān)節(jié)角度置零位 先用手機對零點界面拍照,把六個關(guān)節(jié)的零點脈沖都拍照記錄下來。然后在示教器上對套圈超限關(guān)節(jié)點擊記錄。這時該關(guān)節(jié)角度會變成零點位置的角度,且該關(guān)節(jié)的零點脈沖值會改變,機器人可以手動運行。

手動將機器人移至機械零點附近,見下圖 。姿態(tài)大致一樣就行。

在機械零點附近,把零點脈沖修改為原來拍照的值。確認當前關(guān)節(jié)角度是否在零點附近。如果在,說明套圈已解決。如果不在,與零點位置角度相差約 360°,再進行下一步 操作。

確認超限關(guān)節(jié)角度是往正還是負超了 360°,如果是負方向,可以再次點擊記錄。把當前關(guān)節(jié)角度置零位,然后往正方向轉(zhuǎn) 45 度,然后再改回原來的零點脈沖,這時當前關(guān)節(jié)角度約-315°,再把當前位設(shè)置到 P 變量,并把該 P 變量的第 3 關(guān)節(jié)角度改成-360°,走到該 P 點位,這個位置剛好是機器人機械零位,再次點擊該關(guān)節(jié)的“記錄”,會把該關(guān)節(jié)角度設(shè)成 零點角度,這時就可以正常運行了。如果是正方向超 360°,可以那就向負方向旋轉(zhuǎn)后再操作。


























